引言
AUTOSAR(汽车开放系统架构)旨在为汽车电子控制单元(ECU)提供一个标准化的、开放的软件架构,以提高软件的可重用性、可扩展性和可维护性。在AUTOSAR的分层架构中,微控制器抽象层(MCAL)位于基础软件(BSW)的最底层,是连接上层软件与底层硬件的桥梁。理解MCAL的架构及其提供的基础软件服务,是进行AUTOSAR车载软件开发的基础。
一、AUTOSAR MCAL软件架构基本概念
MCAL(Microcontroller Abstraction Layer)的核心目标是将上层软件(如服务层、复杂驱动等)与具体的微控制器硬件细节进行解耦。它通过提供标准化的API接口,使得上层软件无需关心底层硬件的具体实现,从而实现了软件的可移植性。
1. 分层架构中的定位:
MCAL位于AUTOSAR分层架构的底部,直接与微控制器的内部外设(如ADC、DIO、PWM、CAN、SPI等)和内存映射寄存器进行交互。它为上一层——ECU抽象层(ECUAL)——提供标准化的、与硬件无关的驱动服务接口。
2. 模块化设计:
MCAL本身不是一个单一的模块,而是由一系列独立的、针对特定微控制器外设的驱动模块组成。常见的MCAL模块包括:
- 微控制器驱动(MCU Driver):负责初始化、时钟设置、电源管理以及低功耗模式控制。
- 通用输入/输出驱动(DIO Driver):控制数字输入/输出引脚。
- 模数转换驱动(ADC Driver):控制ADC模块进行模拟信号采样。
- 脉宽调制驱动(PWM Driver):生成PWM信号。
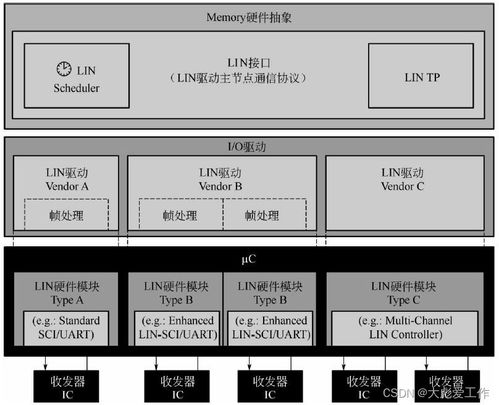
- 通信驱动:如CAN Driver、LIN Driver、SPI Driver、以太网驱动等,负责对应总线的数据收发控制。
- 存储驱动:如EEPROM Driver、Flash Driver,负责非易失性存储器的读写操作。
- 看门狗驱动(WDT Driver):管理系统看门狗定时器。
3. 硬件抽象与配置:
每个MCAL驱动都通过一组标准化的API(如Dio<em>WriteChannel, Adc</em>StartGroupConversion)向上层提供服务。驱动的具体行为(如引脚映射、时钟频率、中断优先级等)完全由配置参数决定,这些参数通过AUTOSAR配置工具(如EB tresos, DaVinci Configurator)生成,并最终编译链接到可执行代码中。这种设计使得同一套上层应用代码,只需更换MCAL配置和驱动实现,即可适配不同的微控制器。
二、MCAL提供的基础软件服务
MCAL作为基础软件的核心组成部分,向上层提供了以下几类关键的基础服务:
1. 初始化与时钟管理服务:
主要由MCU Driver提供。在ECU上电后,首先执行MCAL的初始化序列,包括配置微控制器的内核时钟、外设时钟、锁相环(PLL)以及初始化内存保护单元(MPU)等。这些服务为整个软件系统的稳定运行奠定了基础。
- 数字与模拟I/O服务:
- DIO Driver:提供读取/设置单个或多个数字引脚电平的功能。
- Port Driver:配置每个I/O引脚的功能(如通用I/O、专用外设功能)、驱动强度、上下拉电阻等。
- ADC Driver:提供启动转换、读取转换结果、配置采样通道和组、支持查询和中断两种方式获取结果等服务。
- PWM Driver:提供设置占空比、周期、极性等参数以生成精确的PWM波形。
3. 通信服务:
这是MCAL中非常关键的一类服务,实现了车辆内部网络通信的底层硬件控制。
- CAN Driver:负责CAN控制器的初始化、报文的发送(
Can_Write)和接收(通常通过配置的中断或轮询模式)、波特率设置、硬件过滤器配置等。它不涉及高层协议(如CAN Transport Layer, CAN Network Management),仅处理物理层和数据链路层的硬件操作。
- 其他通信驱动(LIN, SPI, Ethernet MAC等)提供类似的基础收发与控制服务。
- 存储服务:
- Flash Driver:提供对内部Flash存储器的擦除、写入和读取服务,通常用于存储应用程序代码或校准数据。它实现了复杂的擦写序列和状态机,确保操作的可靠性和对硬件的保护。
- EEPROM Driver:提供对EEPROM(内部或外部)的读写服务,通常用于存储需要频繁修改且断电保存的数据,如故障码、里程信息等。
- 定时与监控服务:
- GPT Driver(通用定时器驱动):提供精确的定时和延时功能,可以配置为单次或连续模式,并产生中断。
- WDT Driver:提供对硬件看门狗定时器的初始化和“喂狗”服务,是确保系统在软件跑飞或死锁时能够自动复位恢复的关键安全机制。
6. 中断处理服务:
虽然中断向量表的管理通常由MCU Driver或操作系统处理,但MCAL中的许多驱动(如ADC, CAN, GPT)都依赖于硬件中断来实现高效的事件驱动操作。MCAL负责在驱动初始化时配置相关外设的中断使能和优先级,并提供中断服务例程(ISR)的框架。
三、
AUTOSAR MCAL通过其高度模块化和标准化的设计,成功地将汽车ECU软件与底层硬件解耦。它提供的一系列基础软件服务——涵盖I/O控制、通信、存储、定时与安全监控——构成了整个AUTOSAR软件栈运行的硬件基石。对于开发者而言,掌握MCAL的架构概念和各驱动的服务接口,是进行ECU底层配置、驱动开发以及系统集成与调试的关键。随着汽车电子电气架构向域控制器和中央计算平台演进,MCAL作为标准化硬件接口层的价值将愈发凸显,其稳定性和效率直接影响到整个汽车控制系统的性能与可靠性。