AUTOSAR(AUTomotive Open System ARchitecture)是一种广泛应用于汽车电子领域的开放式软件架构标准。其中,MCAL(Microcontroller Abstraction Layer)作为AUTOSAR架构的基础层,扮演着至关重要的角色。本文将介绍MCAL软件架构的基本概念及其基础软件服务。
一、MCAL软件架构基本概念
1. MCAL的定义与作用
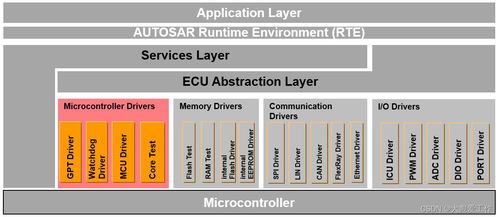
MCAL是AUTOSAR分层架构中的最底层,直接与微控制器硬件交互。其主要目的是提供硬件抽象,使上层软件(如ECU抽象层、服务层等)能够独立于具体的硬件平台。通过MCAL,汽车电子软件开发人员可以避免直接操作寄存器,从而提高代码的可移植性和可维护性。
2. MCAL的模块组成
MCAL包含多个硬件驱动模块,常见的有:
- 微控制器驱动(Microcontroller Drivers):如看门狗定时器(WDT)、通用定时器(GPT)、内核测试(MCU)等。
- 通信驱动(Communication Drivers):如CAN、LIN、FlexRay、以太网驱动等。
- 内存驱动(Memory Drivers):如内部Flash、EEPROM驱动等。
- I/O驱动(I/O Drivers):如ADC、DIO、PWM、ICU驱动等。
这些模块共同实现了对微控制器外设的统一访问接口。
3. MCAL的配置与集成
MCAL通常通过配置工具(如EB Tresos、DaVinci Configurator等)进行参数化配置,以适应不同的硬件和项目需求。配置完成后,MCAL模块被集成到基础软件(BSW)中,为上层应用提供标准化服务。
二、基础软件服务
在AUTOSAR架构中,基础软件(BSW)分为多个层次,MCAL之上的层包括ECU抽象层、服务层和复杂驱动层。这些层共同提供以下基础软件服务:
1. 通信服务
基于MCAL的通信驱动,服务层提供统一的通信栈,如COM模块、PDU路由器等,支持CAN、LIN、FlexRay和以太网等通信协议,实现ECU之间的数据交换。
2. 内存服务
通过内存抽象层(MemIf)和内存驱动,基础软件提供非易失性内存(NVM)管理服务,包括数据的存储、读取和校验,确保数据的可靠性和一致性。
3. 系统服务
系统服务包括操作系统(OS)、错误管理(Dem)、看门狗管理(WdgM)等。这些服务依赖于MCAL的微控制器驱动,提供任务调度、错误检测和系统监控功能。
4. I/O服务
ECU抽象层和服务层基于MCAL的I/O驱动,提供模拟和数字I/O的抽象接口,如ADc、IoHwAb等,简化传感器和执行器的控制。
5. 诊断服务
诊断通信管理(Dcm)和诊断事件管理(Dem)模块利用MCAL的通信和系统驱动,实现UDS(Unified Diagnostic Services)等诊断协议,支持车辆故障检测和维修。
MCAL作为AUTOSAR架构的基石,通过硬件抽象为上层基础软件服务提供了统一、可靠的接口。这种分层设计不仅提升了汽车电子软件的模块化和可重用性,还加速了开发流程,降低了系统复杂度。随着汽车电子技术的演进,MCAL和基础软件服务将继续在确保功能安全、实时性和可扩展性方面发挥关键作用。